فهرست مطالب
- 1. مقدمه و مرور کلی
- 2. مدلهای سیستم و سناریوها
- 3. محدودیتهای نظری دقت: کران پایین کرامر-رائو
- 4. تخمینگرهای عملی: رویکرد درستنمایی بیشینه
- 5. نتایج و تحلیل عملکرد
- 6. بینش کلیدی و دیدگاه تحلیلی
- 7. جزئیات فنی و چارچوب ریاضی
- 8. چارچوب تحلیل: یک مطالعه موردی مفهومی
- 9. کاربردهای آینده و جهتهای پژوهشی
- 10. مراجع
1. مقدمه و مرور کلی
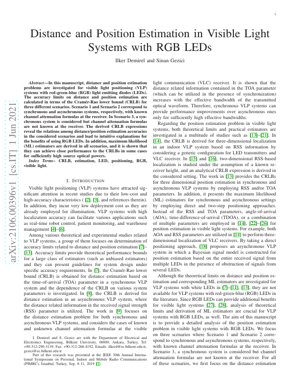
این پژوهش، محدودیتهای بنیادی دقت برای تخمین فاصله و موقعیت در سیستمهای موقعیتیابی نور مرئی (VLP) که از دیودهای نورافشان قرمز-سبز-آبی (RGB LED) استفاده میکنند را بررسی میکند. هسته اصلی این کار، یک تحلیل نظری و عملی دقیق در سه سناریو عملیاتی متمایز است که عملکرد را از طریق کران پایین کرامر-رائو (CRLB) ارزیابی کرده و تخمینگرهای درستنمایی بیشینه (ML) متناظر را استخراج میکند. این مطالعه بینشهای مهمی در مورد زمان و چگونگی برتری LEDهای RGB نسبت به LEDهای تکرنگ برای موقعیتیابی ارائه میدهد.
2. مدلهای سیستم و سناریوها
تحلیل حول سه سناریو کلیدی ساختار یافته است که محدودیتهای عملی رایج در استقرار VLP را نشان میدهند.
2.1 سناریو ۱: سیستم همگام با مدل کانال شناختهشده
فرض بر همگامسازی کامل بین فرستنده و گیرنده، و دانش کامل از فرمول تضعیف کانال (مانند مدل لامبرتین) است. این یک سناریوی نظری بهترین حالت را نشان میدهد که در آن هم اطلاعات زمان ورود (TOA) و هم اطلاعات قدرت سیگنال دریافتی (RSS) میتوانند به طور کامل مورد استفاده قرار گیرند.
2.2 سناریو ۲: سیستم غیرهمگام با مدل کانال شناختهشده
هیچ همگامسازیای بین فرستنده و گیرنده وجود ندارد. گیرنده باید صرفاً برای تخمین بر اطلاعات RSS تکیه کند، اما مدل کانال شناخته شده است. این یک سناریوی عملیتر اما چالشبرانگیز است که در استقرارهای حساس به هزینه رایج است.
2.3 سناریو ۳: سیستم همگام با مدل کانال ناشناخته
در حالی که همگامسازی موجود است (امکان استفاده از TOA را فراهم میکند)، ویژگیهای دقیق تضعیف کانال برای گیرنده ناشناخته است. این، موقعیتهایی با عوامل محیطی غیرقابل پیشبینی یا سختافزار کالیبرهنشده را مدل میکند.
3. محدودیتهای نظری دقت: کران پایین کرامر-رائو
CRLB یک کران پایین بنیادی بر واریانس هر تخمینگر نااریب ارائه میدهد. برای یک بردار پارامتر $\boldsymbol{\theta}$ (مانند فاصله یا موقعیت ۲بعدی/۳بعدی)، بر اساس بردار مشاهده $\mathbf{x}$، CRLB توسط معکوس ماتریس اطلاعات فیشر (FIM) $\mathbf{I}(\boldsymbol{\theta})$ داده میشود:
$\text{Var}(\hat{\theta}_i) \geq [\mathbf{I}^{-1}(\boldsymbol{\theta})]_{ii}, \quad \text{where} \quad [\mathbf{I}(\boldsymbol{\theta})]_{ij} = -E\left[ \frac{\partial^2 \ln p(\mathbf{x}; \boldsymbol{\theta})}{\partial \theta_i \partial \theta_j} \right]$
مقاله، عبارات صریح CRLB را برای تخمین فاصله و موقعیت در هر سناریو استخراج میکند. یک یافته کلیدی این است که CRLB برای تخمین فاصله در سناریو ۱ با مربع پهنای باند مؤثر $\beta^2$ سیگنال نوری ارسالی نسبت معکوس دارد: $\text{CRLB}(d) \propto 1/\beta^2$. این نقش حیاتی طراحی سیگنال در سیستمهای همگام را برجسته میکند.
4. تخمینگرهای عملی: رویکرد درستنمایی بیشینه
برای هر سناریو، تخمینگر ML متناظر استخراج شده است. تخمینگر ML برای فاصله $d$ در سناریو ۱، تحت فرض نویز سفید گاوسی افزودنی (AWGN)، شامل حل معادله زیر است:
$\hat{d}_{\text{ML}} = \arg\min_d \sum_{k=1}^{K} \left( r_k - \alpha \frac{P_t}{d^2} s(t_k - \tau(d)) \right)^2$
که در آن $r_k$ نمونههای دریافتی، $P_t$ توان ارسالی، $\alpha$ بهره کانال، $s(\cdot)$ شکل موج ارسالی، و $\tau(d)$ زمان ورود (TOA) است. مقاله نشان میدهد که این تخمینگرهای ML تحت شرایط نسبت سیگنال به نویز (SNR) بالا میتوانند به صورت مجانبی به CRLB دست یابند.
5. نتایج و تحلیل عملکرد
نتایج نظری و شبیهسازی چندین روند کلیدی را نشان میدهند:
- مقایسه سناریوها: سناریو ۱ (همگام، کانال شناختهشده) بهترین دقت را ارائه میدهد، پس از آن سناریو ۳ (همگام، کانال ناشناخته) قرار دارد، در حالی که سناریو ۲ (غیرهمگام) بالاترین کرانهای خطا را نشان میدهد، به ویژه در پهنای باندهای پایینتر.
- مزیت LEDهای RGB: استفاده از LEDهای RGB نشان داده که دقت تخمین را بهبود میبخشد. این به طور شهودی با بهره تنوع توضیح داده میشود — سیگنالهای مستقل از کانالهای R، G و B، مشاهدات متعدد و تا حدی غیرهمبسته از پارامترهای هندسی یکسان (فاصله/موقعیت) را فراهم میکنند و به طور مؤثری نویز را میانگین میگیرند.
- مبادله پهنای باند در مقابل توان: در سیستمهای همگام، افزایش پهنای باند مؤثر سیگنال $\beta$ به طور قابل توجهی CRLB را کاهش میدهد، اغلب مؤثرتر از صرفاً افزایش توان نوری. این پیامدهای مهمی برای طراحی سیستم دارد و مدولاسیون پیچیده را بر افزایش توان خام ترجیح میدهد.
- عملکرد ML: تخمینگرهای ML استخراج شده از طریق شبیهسازی نشان دادهاند که در توانهای نوری ارسالی به اندازه کافی بالا به CRLBهای مربوطه خود نزدیک میشوند، که بهینه بودن عملی آنها در رژیمهای SNR بالا را تأیید میکند.
6. بینش کلیدی و دیدگاه تحلیلی
بینش کلیدی: کار دمیرل و گزیجی صرفاً یک مقاله دیگر VLP نیست؛ بلکه یک تجزیه دقیق از ارزش پیشنهادی LEDهای RGB در موقعیتیابی است. بینش اصلی این است که مزیت RGB فراتر از رنگ یا انتقال داده است — این شکلی از تنوع فضایی ضمنی است. با فراهم کردن سه کانال موازی، هممکان فیزیکی اما متمایز طیفی، یک LED RGB ذاتاً یک افزونگی مشاهدهای ۳ برابری برای پارامترهای هندسی ارائه میدهد که مستقیماً ماهیت محدود به نویز اندازهگیریهای RSS و TOA را هدف میگیرد. این مشابه استفاده از چندین آنتن در سیستمهای RF است اما از طریق یک تغییر سختافزاری ارزان و متمرکز بر روشنایی حاصل میشود.
جریان منطقی: منطق مقاله به طور بیعیبی واضح است. با تعریف میدان نبرد (سه سناریوی واقعبینانه) شروع میکند، محدودیتهای نهایی عملکرد (CRLB) را به عنوان استاندارد طلا برقرار میکند و سپس سربازان عملی (تخمینگرهای ML) را میسازد تا ببیند چقدر میتوانند به آن حد نزدیک شوند. مقایسه بین سناریوها به ویژه قدرتمند است. این به صورت کمی نشان میدهد که همگامسازی زیر یک آستانه پهنای باند مشخص بیارزش است — یک قاعده طراحی حیاتی که اغلب در عمل نادیده گرفته میشود. اگر پهنای باند مؤثر سیگنال شما پایین است، بهتر است هزینه و پیچیدگی همگامسازی را ذخیره کرده و به روشهای مبتنی بر RSS غیرهمگام پایبند بمانید.
نقاط قوت و ضعف: نقطه قوت در رویکرد بنیادی و ریاضیمحور آن است. یک راهحل ابتکاری پیشنهاد نمیدهد؛ بلکه محدودیتهای بنیادی را استخراج میکند و نتیجهگیریهایش را به طور جهانی قابل اعمال میسازد. استفاده از CRLB یک معیار غیرقابل چالش ارائه میدهد. با این حال، تحلیل دارای ضعف کلاسیک بسیاری از کارهای نظری است: به شدت بر فرض AWGN و مدلهای کانال شناختهشده مانند مدل لامبرتین تکیه میکند. VLP دنیای واقعی با چندمسیره، سایهاندازی، بازتابهای غیرلامبرتین (از سطوح براق) و نویز نور محیطی دستبهگریبان است — عواملی که میتوانند عملکرد را از این کرانهای نظری به شدت تنزل دهند، همانطور که در مطالعات تجربی مانند مطالعات کنسرسیوم ارتباط نور مرئی دانشگاه کالیفرنیا ذکر شده است. مقاله مدلهای کانال ناشناخته را در سناریو ۳ تصدیق میکند اما آن را به عنوان یک عدم قطعیت پارامتری در نظر میگیرد. چالش مخربتر، یک کانال غیرپارامتری و پویا است، که جایی است که رویکردهای مبتنی بر داده و یادگیری ماشین، با الهام از کارهایی مانند CycleGAN برای انطباق حوزه، اکنون به سمت آن حرکت میکنند.
بینشهای قابل اجرا: برای معماران سیستم، این مقاله دستورالعملهای روشنی ارائه میدهد: ۱) اولویت دادن به پهنای باند: اگر در حال ساخت یک سیستم همگام هستید، قبل از افزایش توان نوری، در درایورهای پهنباند بالا و طرحهای مدولاسیون (مانند OFDM) سرمایهگذاری کنید. ۲) توجیه RGB: از استدلال تنوع برای توجیه هزینه کمی بالاتر LEDهای RGB نسبت به LEDهای تکرنگ برای کاربردهای موقعیتیابی با دقت بالا استفاده کنید. ۳) انتخاب میدان نبرد: برای ردیابی داخلی در مقیاس بزرگ و کمهزینه (مانند موجودی انبار)، یک سیستم مبتنی بر RSS غیرهمگام با LEDهای RGB ممکن است بهترین مبادله هزینه-دقت را ارائه دهد. برای هدایت ربات جراحی، همگام بروید و هیچ هزینهای برای پهنای باند دریغ نکنید. ۴) مرز بعدی استحکام است: محدودیتهای نظری اکنون به خوبی درک شدهاند. موج بعدی نوآوری، همانطور که در پیشچاپهای اخیر arXiv و مجلات IEEE دیده میشود، بر مقاومسازی این تخمینگرها در برابر واقعیتهای آشفته انتشار داخلی متمرکز خواهد بود، که احتمالاً رویکردهای مبتنی بر مدل (مانند این مقاله) را با تکنیکهای مبتنی بر یادگیری برای تابآوری کانال ادغام میکند.
7. جزئیات فنی و چارچوب ریاضی
توان نوری دریافتی $P_r$ از یک LED معمولاً توسط فرمول لامبرتین مدل میشود:
$P_r = \begin{cases} \frac{m+1}{2\pi d^2} A \cos^m(\phi) \cos(\psi) P_t, & 0 \le \psi \le \Psi_c \\ 0, & \psi > \Psi_c \end{cases}$
که در آن $d$ فاصله، $A$ مساحت آشکارساز، $\phi$ زاویه تابش، $\psi$ زاویه برخورد، $\Psi_c$ میدان دید گیرنده، $m$ مرتبه لامبرتین، و $P_t$ توان ارسالی است. برای یک LED RGB، این مدل به طور مستقل برای هر کانال رنگی (R، G، B) اعمال میشود، با $P_t$ بالقوه متفاوت برای هر کانال.
اطلاعات فیشر برای فاصله $d$ در سناریو ۱، با در نظر گرفتن هر دو TOA و RSS، و تجمیع اطلاعات از $N_c$ کانال رنگی (مثلاً ۳ برای RGB)، میتواند به صورت زیر بیان شود:
$I(d) = \sum_{c=1}^{N_c} \left( \frac{2 \beta_c^2 \text{SNR}_c}{c^2} + \frac{4 \text{SNR}_c}{d^2} \right)$
که در آن $\beta_c$ پهنای باند مؤثر کانال $c$، $c$ سرعت نور، و $\text{SNR}_c$ نسبت سیگنال به نویز برای آن کانال است. عبارت اول داخل جمع از اطلاعات TOA ناشی میشود و به $\beta_c^2$ وابسته است. عبارت دوم از اطلاعات RSS ناشی میشود. جمع به وضوح بهره تنوع حاصل از استفاده از کانالهای متعدد را نشان میدهد.
8. چارچوب تحلیل: یک مطالعه موردی مفهومی
سناریو: طراحی یک سیستم VLP برای ناوبری وسیله نقلیه هدایتشده خودکار (AGV) در یک کارخانه هوشمند.
کاربرد چارچوب:
- تحلیل نیازمندی: دقت موقعیتیابی هدف < ۱۰ سانتیمتر در ۳بعد. محیط دارای سقفهای بلند (۵ متر)، ماشینآلاتی که گاهی اوقات باعث اکلوزیون میشوند، و نورپردازی محیطی فلورسنت است.
- انتخاب سناریو: نیازمندی دقت بالا به سمت یک سیستم همگام (سناریو ۱ یا ۳) سوق میدهد. با این حال، پروفایل اکلوزیون ناشناخته و متغیر نشان میدهد که مدل کانال در همه زمانها به طور کامل شناخته شده نخواهد بود، که استدلالی برای تحلیل سناریو ۳ است.
- انتخاب فناوری: استفاده از LEDهای RGB برای چراغهای سقفی. تحلیل این مقاله انتخاب را توجیه میکند: بهره تنوع به کاهش از دست دادن دقت زمانی که یک کانال رنگی توسط یک جسم مسدودکننده مسدود یا به شدت تضعیف میشود کمک میکند.
- طراحی پارامتر: برای دستیابی به دقت استخراجشده از CRLB، پهنای باند مؤثر مورد نیاز $\beta$ را محاسبه کنید. فرمولهای مقاله نشان میدهند که با تنوع RGB، $\beta$ مورد نیاز (و در نتیجه هزینه/پیچیدگی سیستم) برای یک دقت معین، کمتر از یک سیستم تکرنگ است.
- پیادهسازی تخمینگر: تخمینگر ML را برای سناریو ۳ پیادهسازی کنید. از یک فاز کالیبراسیون برای ساخت یک مدل کانال اولیه استفاده کنید، اما اجازه دهید تخمینگر با در نظر گرفتن برخی پارامترهای کانال به عنوان ناشناخته (مطابق چارچوب مقاله) سازگار شود.
- اعتبارسنجی: خطای موقعیتیابی AGV در دنیای واقعی را با CRLB پیشبینی شده برای SNR و پهنای باند سیستم مقایسه کنید. یک شکاف قابل توجه نشاندهنده اثرات مدلنشده (مانند چندمسیره) خواهد بود که حرکت به سمت روشهای مقاومتر و ترکیبی مبتنی بر مدل/دادهمحور را تشویق میکند.
9. کاربردهای آینده و جهتهای پژوهشی
کار بنیادی ارائه شده، دروازههایی به سوی چندین کاربرد پیشرفته و مسیر پژوهشی باز میکند:
- حسآمیزی و ارتباطات یکپارچه در ۶G (ISAC): VLP یک نامزد طبیعی برای ISAC در شبکههای نسل بعدی است. LEDهای RGB میتوانند به طور همزمان روشنایی، ارتباطات داده پرسرعت (Li-Fi) و موقعیتیابی دقیق را فراهم کنند، همانطور که در پژوهشهای مؤسساتی مانند PureLiFi و دانشگاه ادینبورگ بررسی شده است.
- واقعیت افزوده (AR) و متاورس: موقعیتیابی داخلی زیر سانتیمتر برای تجربیات AR بیدرز حیاتی است. سیستمهای VLP RGB تعبیهشده در نورپردازی اتاق میتوانند دقت لازم برای لنگراندازی اشیاء و ردیابی کاربر را بدون حسگرهای خارجی فراهم کنند.
- ناوبری رباتیک و پهپاد: در محیطهای فاقد GPS مانند انبارها، معادن یا مزارع داخلی، VLP با LEDهای RGB یک راهحل ناوبری قابل اعتماد و مبتنی بر زیرساخت ارائه میدهد. بهره تنوع برای مقابله با تغییرات جهت ربات/پهپاد حیاتی است.
- پایش زیستپزشکی و مراقبت سلامت: ردیابی بیمار و تجهیزات در بیمارستانها با قابلیت اطمینان بالا و بدون تداخل RF.
- جهتهای پژوهشی:
- یادگیری ماشین برای موقعیتیابی مستقل از کانال: توسعه تخمینگرهای یادگیری عمیق (مانند استفاده از شبکههای عصبی کانولوشنال بر روی الگوهای سیگنال دریافتی) که در برابر کانالهای کاملاً ناشناخته و پویا مقاوم هستند، فراتر از مدل ناشناخته پارامتری سناریو ۳.
- سیستمهای ترکیبی RF-VLC: ادغام VLP با موقعیتیابی UWB یا WiFi برای پوشش نقاط کور هر فناوری، با بهرهگیری از دقت بالای VLP در فضاهای باز و قابلیت نفوذ RF.
- گیرندههای VLP برداشتکننده انرژی: طراحی گیرندههایی که میتوانند موقعیتیابی را با استفاده از خود انرژی نوری برداشتشده انجام دهند و گرههای حسگر اینترنت اشیاء دائمی را ممکن سازند.
- استانداردسازی: تلاش برای استانداردهای صنعتی گسترده در مورد مدولاسیون، کدینگ و پروتکلها برای VLP، مشابه IEEE 802.15.7 برای VLC، برای تضمین قابلیت همکاری.
10. مراجع
- Demirel, I., & Gezici, S. (2021). Distance and Position Estimation in Visible Light Systems with RGB LEDs. arXiv preprint arXiv:2106.00396.
- Kahn, J. M., & Barry, J. R. (1997). Wireless infrared communications. Proceedings of the IEEE, 85(2), 265-298.
- Zhuang, Y., Hua, L., Qi, L., Yang, J., Cao, P., Cao, Y., ... & Thompson, J. (2018). A survey of positioning systems using visible LED lights. IEEE Communications Surveys & Tutorials, 20(3), 1963-1988.
- Visible Light Communication Consortium (VLCC). (2023). Research on Practical VLP Impairments. [Online]. Available: http://www.vlcc.net
- Isola, P., Zhu, J. Y., Zhou, T., & Efros, A. A. (2017). Image-to-image translation with conditional adversarial networks. Proceedings of the IEEE conference on computer vision and pattern recognition (pp. 1125-1134). (مرتبط با روشهای انطباق کانال دادهمحور).
- PureLiFi. (2023). Li-Fi for Integrated Sensing and Communication. [White Paper].
- IEEE Standard for Local and Metropolitan Area Networks–Part 15.7: Short-Range Wireless Optical Communication Using Visible Light. (2018). IEEE Std 802.15.7-2018.