Kandungan
- 1. Pengenalan & Gambaran Keseluruhan
- 2. Model dan Senario Sistem
- 3. Had Ketepatan Teori: Batas Bawah Cramér-Rao
- 4. Penganggar Praktikal: Pendekatan Kebolehjadian Maksimum
- 5. Keputusan dan Analisis Prestasi
- 6. Inti Pati & Perspektif Penganalisis
- 7. Butiran Teknikal & Kerangka Matematik
- 8. Kerangka Analisis: Kajian Kes Konseptual
- 9. Aplikasi Masa Depan & Hala Tuju Penyelidikan
- 10. Rujukan
1. Pengenalan & Gambaran Keseluruhan
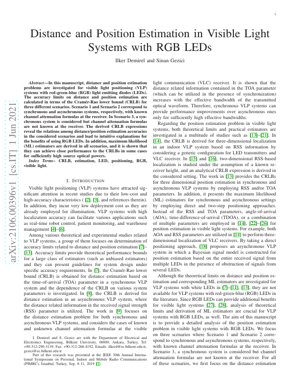
Kajian ini menyiasat had ketepatan asas untuk anggaran jarak dan kedudukan dalam sistem Penentuan Kedudukan Cahaya Nampak (VLP) yang menggunakan Diod Pemancar Cahaya Merah-Hijau-Biru (LED RGB). Sumbangan terasnya ialah analisis teori dan praktikal yang ketat merentasi tiga senario operasi berbeza, menilai prestasi melalui Batas Bawah Cramér-Rao (CRLB) dan menerbitkan penganggar Kebolehjadian Maksimum (ML) yang sepadan. Kajian ini memberikan pandangan kritikal tentang bila dan bagaimana LED RGB menawarkan kelebihan berbanding LED satu warna untuk pelokalan.
2. Model dan Senario Sistem
Analisis ini disusun mengikut tiga senario utama yang mewakili kekangan praktikal biasa dalam penyebaran VLP.
2.1 Senario 1: Sistem Segerak dengan Model Saluran Diketahui
Menganggap penyegerakan sempurna antara pemancar dan penerima, serta pengetahuan sempurna tentang formula pelemahan saluran (contohnya, model Lambertian). Ini mewakili senario kes terbaik teori di mana kedua-dua maklumat Masa Ketibaan (TOA) dan Kekuatan Isyarat Diterima (RSS) boleh dimanfaatkan sepenuhnya.
2.2 Senario 2: Sistem Tak Segerak dengan Model Saluran Diketahui
Tiada penyegerakan antara pemancar dan penerima. Penerima mesti bergantung sepenuhnya pada maklumat RSS untuk anggaran, tetapi model saluran diketahui. Ini adalah senario yang lebih praktikal tetapi mencabar dan biasa dalam penyebaran sensitif kos.
2.3 Senario 3: Sistem Segerak dengan Model Saluran Tidak Diketahui
Walaupun penyegerakan tersedia (membolehkan penggunaan TOA), ciri pelemahan saluran yang tepat tidak diketahui oleh penerima. Ini memodelkan situasi dengan faktor persekitaran yang tidak dapat diramal atau perkakasan yang tidak ditentukur.
3. Had Ketepatan Teori: Batas Bawah Cramér-Rao
CRLB memberikan batas bawah asas untuk varians sebarang penganggar tidak pincang. Untuk vektor parameter $\boldsymbol{\theta}$ (contohnya, jarak atau kedudukan 2D/3D), berdasarkan vektor cerapan $\mathbf{x}$, CRLB diberikan oleh songsangan Matriks Maklumat Fisher (FIM) $\mathbf{I}(\boldsymbol{\theta})$:
$\text{Var}(\hat{\theta}_i) \geq [\mathbf{I}^{-1}(\boldsymbol{\theta})]_{ii}, \quad \text{di mana} \quad [\mathbf{I}(\boldsymbol{\theta})]_{ij} = -E\left[ \frac{\partial^2 \ln p(\mathbf{x}; \boldsymbol{\theta})}{\partial \theta_i \partial \theta_j} \right]$
Kertas kerja ini menerbitkan ungkapan CRLB eksplisit untuk anggaran jarak dan kedudukan dalam setiap senario. Satu penemuan utama ialah CRLB untuk anggaran jarak dalam Senario 1 berkadar songsang dengan kuasa dua lebar jalur berkesan $\beta^2$ isyarat optik yang dihantar: $\text{CRLB}(d) \propto 1/\beta^2$. Ini menekankan peranan kritikal reka bentuk isyarat dalam sistem segerak.
4. Penganggar Praktikal: Pendekatan Kebolehjadian Maksimum
Untuk setiap senario, penganggar ML yang sepadan diterbitkan. Penganggar ML untuk jarak $d$ dalam Senario 1, di bawah andaian hingar putih Gaussian tambahan (AWGN), melibatkan penyelesaian:
$\hat{d}_{\text{ML}} = \arg\min_d \sum_{k=1}^{K} \left( r_k - \alpha \frac{P_t}{d^2} s(t_k - \tau(d)) \right)^2$
di mana $r_k$ ialah sampel diterima, $P_t$ ialah kuasa pancaran, $\alpha$ ialah gandaan saluran, $s(\cdot)$ ialah bentuk gelombang dihantar, dan $\tau(d)$ ialah TOA. Kertas kerja ini menunjukkan bahawa penganggar ML ini secara asimptotik boleh mencapai CRLB di bawah keadaan nisbah isyarat-kepada-hingar (SNR) tinggi.
5. Keputusan dan Analisis Prestasi
Keputusan teori dan simulasi menunjukkan beberapa trend utama:
- Perbandingan Senario: Senario 1 (segerak, saluran diketahui) memberikan ketepatan terbaik, diikuti oleh Senario 3 (segerak, saluran tidak diketahui), dengan Senario 2 (tak segerak) menunjukkan batas ralat tertinggi, terutamanya pada lebar jalur lebih rendah.
- Kelebihan LED RGB: Penggunaan LED RGB ditunjukkan meningkatkan ketepatan anggaran. Ini dijelaskan secara intuitif oleh gandaan kepelbagaian—isyarat bebas dari saluran R, G, dan B menyediakan pelbagai cerapan parameter geometri yang sama (jarak/kedudukan) yang sedikit tidak berkorelasi, secara berkesan meratakan hingar.
- Pertukaran Lebar Jalur vs. Kuasa: Dalam sistem segerak, meningkatkan lebar jalur berkesan $\beta$ isyarat mengurangkan CRLB dengan ketara, selalunya lebih berkesan daripada sekadar meningkatkan kuasa optik. Ini mempunyai implikasi penting untuk reka bentuk sistem, memihak kepada modulasi canggih berbanding peningkatan kuasa kasar.
- Prestasi ML: Penganggar ML yang diterbitkan ditunjukkan melalui simulasi menghampiri CRLB masing-masing pada kuasa optik pancaran yang cukup tinggi, mengesahkan keoptimalan praktikalnya dalam rejim SNR tinggi.
6. Inti Pati & Perspektif Penganalisis
Inti Pati: Kerja Demirel dan Gezici bukan sekadar satu lagi kertas kerja VLP; ia adalah dekonstruksi ketat terhadap proposisi nilai LED RGB dalam pelokalan. Inti patinya ialah manfaat RGB melampaui warna atau penghantaran data—ia adalah satu bentuk kepelbagaian ruang tersirat. Dengan menyediakan tiga saluran selari, terletak bersama secara fizikal tetapi berbeza secara spektrum, LED RGB secara semula jadi menawarkan lebihan cerapan 3x untuk parameter geometri, secara langsung menyerang sifat terhad hingar pengukuran RSS dan TOA. Ini adalah analogi kepada penggunaan berbilang antena dalam sistem RF tetapi dicapai melalui pengubahsuaian perkakasan murah yang berpusatkan pencahayaan.
Aliran Logik: Logik kertas kerja ini sangat kemas. Ia bermula dengan mentakrifkan medan pertempuran (tiga senario realistik), menetapkan had prestasi muktamad (CRLB) sebagai piawaian emas, dan kemudian membina askar praktikal (penganggar ML) untuk melihat sejauh mana mereka boleh menghampiri had tersebut. Perbandingan merentasi senario amat berkuasa. Ia secara kuantitatif menunjukkan bahawa penyegerakan tidak bernilai di bawah ambang lebar jalur tertentu—satu peraturan reka bentuk kritikal yang sering terlepas dalam amalan. Jika lebar jalur berkesan isyarat anda rendah, anda mungkin lebih baik menjimatkan kos dan kerumitan penyegerakan dan kekal dengan kaedah berasaskan RSS tak segerak.
Kekuatan & Kelemahan: Kekuatannya terletak pada pendekatan asas, matematik-dahulu. Ia tidak mencadangkan penyelesaian heuristik; ia menerbitkan batas asas, menjadikan kesimpulannya boleh digunakan secara universal. Penggunaan CRLB menyediakan penanda aras yang tidak boleh dicabar. Walau bagaimanapun, analisis ini mempunyai kelemahan klasik banyak kerja teori: ia sangat bergantung pada andaian AWGN dan model saluran diketahui seperti model Lambertian. VLP dunia sebenar dilanda pelbagai laluan, bayangan, pantulan bukan Lambertian (dari permukaan berkilat), dan hingar cahaya ambien—faktor yang boleh merosotkan prestasi dengan teruk dari batas teori ini, seperti yang diperhatikan dalam kajian eksperimen seperti dari Konsortium Komunikasi Cahaya Nampak Universiti California. Kertas kerja ini mengakui model saluran tidak diketahui dalam Senario 3 tetapi menganggapnya sebagai ketidakpastian berparameter. Cabaran yang lebih mengganggu ialah saluran bukan berparameter, dinamik, yang merupakan hala tuju pendekatan berasaskan data dan pembelajaran mesin, diilhamkan oleh kerja seperti CycleGAN untuk penyesuaian domain.
Pandangan Boleh Tindak: Untuk arkitek sistem, kertas kerja ini menawarkan arahan jelas: 1) Keutamakan Lebar Jalur: Jika anda membina sistem segerak, labur dalam pemacu lebar jalur tinggi dan skim modulasi (contohnya, OFDM) sebelum meningkatkan kuasa optik. 2) Justifikasikan RGB: Gunakan hujah kepelbagaian untuk mewajarkan kos LED RGB yang sedikit lebih tinggi berbanding LED satu warna untuk aplikasi penentuan kedudukan ketepatan tinggi. 3) Pilih Medan Pertempuran Anda: Untuk penjejakan dalaman berskala besar, kos rendah (contohnya, inventori gudang), sistem berasaskan RSS tak segerak dengan LED RGB mungkin menawarkan pertukaran kos-ketepatan terbaik. Untuk panduan robot pembedahan, pilih segerak dan jangan berkira perbelanjaan pada lebar jalur. 4) Sempadan Seterusnya ialah Kekukuhan: Batas teori kini difahami dengan baik. Gelombang inovasi seterusnya, seperti yang dilihat dalam pracetak arXiv dan jurnal IEEE terkini, akan memberi tumpuan kepada menjadikan penganggar ini kukuh terhadap realiti kucar-kacir perambatan dalaman, kemungkinan menggabungkan pendekatan berasaskan model (seperti kertas kerja ini) dengan teknik berasaskan pembelajaran untuk ketahanan saluran.
7. Butiran Teknikal & Kerangka Matematik
Kuasa optik diterima $P_r$ dari LED biasanya dimodelkan oleh formula Lambertian:
$P_r = \begin{cases} \frac{m+1}{2\pi d^2} A \cos^m(\phi) \cos(\psi) P_t, & 0 \le \psi \le \Psi_c \\ 0, & \psi > \Psi_c \end{cases}$
di mana $d$ ialah jarak, $A$ ialah luas pengesan, $\phi$ ialah sudut penyinaran, $\psi$ ialah sudut kejadian, $\Psi_c$ ialah medan pandangan penerima, $m$ ialah tertib Lambertian, dan $P_t$ ialah kuasa pancaran. Untuk LED RGB, model ini digunakan secara bebas untuk setiap saluran warna (R, G, B), dengan $P_t$ yang berpotensi berbeza setiap saluran.
Maklumat Fisher untuk jarak $d$ dalam Senario 1, mempertimbangkan kedua-dua TOA dan RSS, dan menggabungkan maklumat dari $N_c$ saluran warna (contohnya, 3 untuk RGB), boleh dinyatakan sebagai:
$I(d) = \sum_{c=1}^{N_c} \left( \frac{2 \beta_c^2 \text{SNR}_c}{c^2} + \frac{4 \text{SNR}_c}{d^2} \right)$
di mana $\beta_c$ ialah lebar jalur berkesan saluran $c$, $c$ ialah kelajuan cahaya, dan $\text{SNR}_c$ ialah nisbah isyarat-kepada-hingar untuk saluran tersebut. Sebutan pertama dalam penjumlahan datang dari maklumat TOA dan bergantung pada $\beta_c^2$. Sebutan kedua datang dari maklumat RSS. Penjumlahan ini jelas menunjukkan gandaan kepelbagaian daripada penggunaan berbilang saluran.
8. Kerangka Analisis: Kajian Kes Konseptual
Senario: Mereka bentuk sistem VLP untuk navigasi kenderaan pandu automatik (AGV) dalam kilang pintar.
Aplikasi Kerangka:
- Analisis Keperluan: Sasaran ketepatan penentuan kedudukan < 10 cm dalam 3D. Persekitaran mempunyai siling tinggi (5m), mesin menyebabkan okklusi sekali-sekala, dan pencahayaan ambien pendarfluor.
- Pemilihan Senario: Keperluan ketepatan tinggi mendorong ke arah sistem segerak (Senario 1 atau 3). Walau bagaimanapun, profil okklusi yang tidak diketahui dan berubah-ubah mencadangkan model saluran tidak akan diketahui dengan sempurna sepanjang masa, menyokong analisis Senario 3.
- Pilihan Teknologi: Gunakan LED RGB untuk pemasangan siling. Analisis dari kertas kerja ini mewajarkan pilihan tersebut: gandaan kepelbagaian membantu mengurangkan kehilangan ketepatan apabila satu saluran warna disekat atau dilemahkan teruk oleh objek yang mengoklusi.
- Reka Bentuk Parameter: Untuk mencapai ketepatan yang diterbitkan dari CRLB, kira lebar jalur berkesan $\beta$ yang diperlukan. Formula kertas kerja menunjukkan bahawa dengan kepelbagaian RGB, $\beta$ yang diperlukan (dan dengan itu kos/kerumitan sistem) untuk ketepatan tertentu adalah lebih rendah daripada sistem satu warna.
- Pelaksanaan Penganggar: Laksanakan penganggar ML untuk Senario 3. Gunakan fasa penentukuran untuk membina model saluran awal, tetapi benarkan penganggar menyesuaikan diri dengan menganggap beberapa parameter saluran sebagai tidak diketahui (mengikut kerangka kertas kerja).
- Pengesahan: Bandingkan ralat penentuan kedudukan AGV dunia sebenar dengan CRLB yang diramalkan untuk SNR dan lebar jalur sistem. Jurang yang ketara akan menunjukkan kesan tidak termodel (contohnya, pelbagai laluan), mendorong peralihan ke kaedah berasaskan model/hibrid berasaskan data yang lebih kukuh.
9. Aplikasi Masa Depan & Hala Tuju Penyelidikan
Kerja asas yang dibentangkan membuka pintu kepada beberapa aplikasi lanjutan dan laluan penyelidikan:
- Penderiaan dan Komunikasi Bersepadu 6G (ISAC): VLP adalah calon semula jadi untuk ISAC dalam rangkaian generasi seterusnya. LED RGB boleh menyediakan pencahayaan, komunikasi data berkelajuan tinggi (Li-Fi), dan penentuan kedudukan tepat secara serentak, seperti yang diterokai dalam penyelidikan dari institusi seperti PureLiFi dan Universiti Edinburgh.
- Realiti Ditambah (AR) & Metaverse: Penentuan kedudukan dalaman sub-sentimeter adalah kritikal untuk pengalaman AR yang lancar. Sistem VLP RGB yang tertanam dalam pencahayaan bilik boleh memberikan ketepatan yang diperlukan untuk pengikatan objek dan penjejakan pengguna tanpa penderia luaran.
- Navigasi Robotik dan Drone: Dalam persekitaran tanpa GPS seperti gudang, lombong, atau ladang dalaman, VLP dengan LED RGB menawarkan penyelesaian navigasi yang boleh dipercayai dan berasaskan infrastruktur. Gandaan kepelbagaian adalah penting untuk menangani perubahan orientasi robot/drone.
- Pemantauan Bioperubatan dan Penjagaan Kesihatan: Penjejakan pesakit dan aset di hospital dengan kebolehpercayaan tinggi dan tiada gangguan RF.
- Hala Tuju Penyelidikan:
- Pembelajaran Mesin untuk Penentuan Kedudukan Agnostik Saluran: Membangunkan penganggar pembelajaran mendalam (contohnya, menggunakan rangkaian neural konvolusional pada corak isyarat diterima) yang kukuh terhadap saluran yang benar-benar tidak diketahui dan dinamik, melangkaui model tidak diketahui berparameter Senario 3.
- Sistem Hibrid RF-VLC: Menggabungkan VLP dengan penentuan kedudukan UWB atau WiFi untuk menutup titik buta setiap teknologi, memanfaatkan ketepatan tinggi VLP di ruang terbuka dan keupayaan penembusan RF.
- Penerima VLP Penuaian Tenaga: Mereka bentuk penerima yang boleh melakukan penentuan kedudukan menggunakan tenaga optik yang dituai itu sendiri, membolehkan nod sensor IoT kekal.
- Pemiawaian: Mendorong piawaian seluruh industri untuk modulasi, pengekodan, dan protokol untuk VLP, serupa dengan IEEE 802.15.7 untuk VLC, untuk memastikan kebolehoperasian.
10. Rujukan
- Demirel, I., & Gezici, S. (2021). Distance and Position Estimation in Visible Light Systems with RGB LEDs. arXiv preprint arXiv:2106.00396.
- Kahn, J. M., & Barry, J. R. (1997). Wireless infrared communications. Proceedings of the IEEE, 85(2), 265-298.
- Zhuang, Y., Hua, L., Qi, L., Yang, J., Cao, P., Cao, Y., ... & Thompson, J. (2018). A survey of positioning systems using visible LED lights. IEEE Communications Surveys & Tutorials, 20(3), 1963-1988.
- Visible Light Communication Consortium (VLCC). (2023). Research on Practical VLP Impairments. [Online]. Available: http://www.vlcc.net
- Isola, P., Zhu, J. Y., Zhou, T., & Efros, A. A. (2017). Image-to-image translation with conditional adversarial networks. Proceedings of the IEEE conference on computer vision and pattern recognition (pp. 1125-1134). (Relevan untuk kaedah penyesuaian saluran berasaskan data).
- PureLiFi. (2023). Li-Fi for Integrated Sensing and Communication. [White Paper].
- IEEE Standard for Local and Metropolitan Area Networks–Part 15.7: Short-Range Wireless Optical Communication Using Visible Light. (2018). IEEE Std 802.15.7-2018.